
|
Scientific Enlightenment, Div. Two
A.4: The Problem of Representation (and the Constitution of Classical Mechanics) Chapter 6: D'Alembert's Traité de dynamique ACADEMY | previous section | Table of Content | next section | GALLERY |
|
|
Scientific Enlightenment, Div. Two
A.4: The Problem of Representation (and the Constitution of Classical Mechanics) Chapter 6: D'Alembert's Traité de dynamique ACADEMY | previous section | Table of Content | next section | GALLERY |
copyright © 2004 by Lawrence C. Chin. All rights reserved. You may print this out, but quotations from it require that proper reference be given.
D'Alembert is to refine the role of the principle of Conservation in mechanics, in such a way that mechanics shall be completely rational, which apparently Newton's is not -- because of this "force".
"In an introductory discussion [to his Traité de dynamique, 1743, 1758], d'Alembert explains his philosophy of mechanics. The Sciences are divided into two groups -- those which are based on principles which are necessarily true and clear in themselves; and those which are based on physical principles, experimental truths, or simply on hypotheses. Mechanics belongs to the first category of purely rational sciences, although it appears to us as less direct than Geometry or Algebra." (Ibid., p. 245) Since at this stage the first principle of mechanics, Conservation, is the result of the transmutation of the logically necessary substantia or upokeimenon as the underlying substrate of existence (being), mechanics hence is rational. This appears strange to modern physicists because the philosophic spirit (metaphysics) that lay at the origin of mechanics has been purged from it by positivism. Nevertheless, he has a ranking: "Plus l'objet qu'elles [sciences] embrassent est étendu, & considéré d'une maniere générale & abstraite, plus aussi leurs principes sont exempts de nuages & faciles ŕ saisir. C'est cette raison que la Géometrie est plus simple que la Méchanique, & l'une & l'autre moins simples que l'Algébre." (p. ij)1 But by the rationality, or self-evident necessity, of mechanics, he means to derive the laws of nature (motions) not from the conservational principle but from the properties of the dramatis personae of mechanics. But as to be seen, his "laws" are at bottom the restatement of the principle of Conservation.
D'Alembert refines these -- mass, space, and time -- together with the new conserved substrate of existence (being), substantia in motu, and in quantitative terms. First, refinement. "... les Cartésiens... ne reconnoissent point d'espace distingué des corps, & qu'ils regardent l'étendue & la matiere comme une męme chose... nous nous contenterons de remarquer, que pour avoir une idée claire du Mouvement, on ne peut se dispenser de distinguer au moins par l'esprit deux sortes d'étendue: l'une, qui soit regardée comme impénétrable, & qui constitue ce qu'on appelle proprement les corps; l'autre, qui étant considérée simplement comme étendue" (p. vj), is space, "dont les parties soient pénétrables & immobiles" (p. v) and which "puissent servir ŕ juger du repos ou du mouvement des corps. Il nous sera donc toujours permis de concevoir un espace indéfini comme le lieu des corps, soit réel, soit supposé, & de regarder le Mouvement comme le transport du mobile d'un lieu dans un autre." (p. vj - vij) Such motion requires: "Le tems par sa nature coule uniformément, & le Méchanique suppose cette uniformité." D'Alembert therefore divided Descartes' extended substantia into two classes, the penetrable and the impenetrable. He furthermore refines the conception of absolute space and uniform time -- unaware of their logical impossibility. The content of mechanics then consists in the representation of this extended impenetrable moving in the fixed penetrable extended space during time running uniformly everywhere, by means of analytic geometry and differential equation, as already cited.
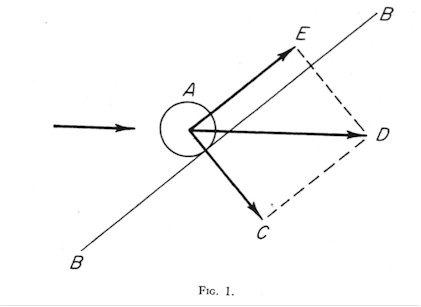
His "rational" mechanics consisted in three laws. First, Conservation. "On voit d'abord fort clairement, qu'un corps ne peut se donner le Mouvement ŕ lui-męme. Il ne peut donc ętre tiré du repos, que par l'action de quelque cause étrangere." ("One sees first of all very clearly, that a body cannot provide itself with [extra] movement. It cannot therefore be pulled out of rest, except by the action of some external cause.") What is is only what it is and cannot be more than what it is, and hence it cannot provide for itself that "extra" by which it may change its state from rest to movement. This then provides the answer for the next: "Mais continue-t-il ŕ se mouvoir de lui-męme, ou a-t-il besoin pour se mouvoir de l'action répétée de la cause?" ("But should it continue to move by itself [once it be set moving by some cause, that is], or does it need, in order to [continue to] move, the repeated action of the cause?") Of course the first, since what is can also never be less than what it is: "la loi la plus simple qu'un mobile puisse observer dans son Mouvement, est la loi d'uniformité, & c'est par conséquent celle qu'il doit suivre..." (p. ix) ("the most simple law which a moving body can observe in its movement, is the law of uniformity, and it is consequently this which it must follow...") Hence again, the law of inertia established as a consequence of Conservation or the logical tautology of A = A. He called it la force d'inertie... "la propriété qu'ont les Corps de persévérer dans leur état de repos ou de Mouvement... le Mouvement... ne sauroit non plus ętre accéléré ou retardé que par une cause étrangere." (p. x) ("the property which the bodies have of perseverance in their state of rest or of movement... the movement... should not be accelerated or retarded except by an external cause.") Now what can be this "cause étrangere"? Only two kinds: first, those causes "qui ont leur source dans l'action sensible & mutuelle des Corps, résultante de leur impénétrabilité:... l'impulsion &... quelques autres actions dérivées de celle-lŕ". (x - xj) ("which have their source in the sensible and mutual actions of the bodies, resulting from their impenetrability... [e.g.] impulsion [collision of some sort and]... some other actions derived from this.") The second kind comprises those which cannot be deduced from the effects, e.g. gravity: "c'est ainsi que sans connoitre la cause de la pesanteur, nous apprenons par l'expérience que les espaces décrits par un Corps qui tombe, sont entr'eux comme les quarrés de tems", e.g. Galileo's d = 1/2at2. (Ibid.) ("it is thus that without understanding the cause of gravity, we learn by experience that the spaces delineated by a body which falls, are between themselves as the square of time.") Because of this non-identity between cause and effect due to the inability to identify the nature of cause, gravity, and forces in general, are purged from d'Alembert's dynamics which has to be "rational", entirely kinematic, as already indicated. Newton's law of universal gravitation "can only be determined from experience" and so cannot figure in rational mechanics.2 The first kind of cause, however, is a different matter. Here are the cases of collision of bodies where "a change of motion is absolutely necessary because they are impenetrable." (Hankins, p. xxiii)3 It is this which then leads to his second law, "la composition des Mouvement", thus regarding the deviation from the inertial condition due to the presence of an external cause: "Comme le Mouvement d'un Corps qui change de direction, peut ętre regardé comme composé du Mouvement qu'il avoit d'abord & d'un nouveau Mouvement qu'il a reçu, de męme le Mouvement que le corps avoit d'abord peut ętre regardé comme composé du nouveau Mouvement qu'il a pris, & d'un autre qu'il a perdu." (xiij) ("Just as the movement of a body which changes direction, can be regarded as composed of a movement which it had beforehand and of a new movement which it has received, so the movement which the body had beforehand can be regarded as composed of a new movement which it has taken on, and of another which it has lost.") The same with collision: "Car il est évident qu'il suffit de décomposer le Mouvement qu'avoit le Corps avant la rencontre de l'obstacle, en deux autres Mouvemens, tels, que l'obstacle ne nuise point ŕ l'un, & qu'il anéantisse l'autre." (p. xiv) ("For it is evident that it is sufficient to decompose the movement which the body had before meeting the obstacle, into two other movements, such as one which the obstacle does not destroy, and another which it annihilates.") This law refers to "the parallelogram rule for the vector addition of velocities" which represents the change of motion due to contact, that is, "the subsequent velocity of a body after a collision" as "determined from the velocity before the collision and the velocity 'lost'." (Hankins, p. xxvii) Thus, in d'Alembert's example, "a perfectly hard, impenetrable sphere A encounters an immovable plane B with some given velocity AD. The component of this velocity perpendicular to the plane (AC) is completely destroyed and the object continues to slide along the plane with velocity (AE)." (Hankins, p. xxvii - xxviii)
The third law is the principle of equilibrium (le principe de l'équilibre), which is related to "la solution de tous les Problęmes oů l'on considere le Mouvement d'un Corps, en tant qu'il peut ętre altéré par un obstacle impénétrable & mobile, c'est-ŕ-dire en général par un autre Corps ŕ qui il doit nécessairement communiquer du Mouvement pour conserver au moins une partie du sien." (p. xv) ("the solution of all the problems where one considers the movement of a body, such that it can be altered by an impenetrable and moving obstacle, that is, in general by another body to which it must necessarily communicate some movement in order to retain at least part of its [movement].") Or, "toutes les loix de la communication du mouvement entre les Corps se réduisent aux loix de l'équilibre, &... les loix de l'équilibre se réduisent elles-męmes ŕ celles de l'équilibre de deux Corps égaux, animés en sens contraires de vitesse virtuelles égales. Dans ce dernier cas les mouvemens de deux Corps se détruiront évidemment l'un l'autre, & par une conséquence géométrique il y aura encore nécessairement équilibre, lorsque les masses seront en raison inverse des vitesses;... quand les masses ne seront pas en raison inverse des vitesses, un des Corps devra nécessairement obliger l'autre ŕ se mouvoir..." (p. xxvij - xxviij) ("all the laws of the communication of movement between bodies are reducible to laws of equilibrium, and laws of equilibrium are themselves reducible to those of equilibrium among two equal bodies, animated [to move] in opposite directions by equal virtual velocities. In this last case the movements of the two bodies destroy each other, and by a geometrical consequence there will necessarily be equilibrium [i.e. statics], when the masses are in inverse proportion to velocities;... when the masses are not in inverse proportion to velocities, one of the bodies must necessarily oblige the other to move...") This law "is close to the law of conservation of momentum... Unfortunately, d'Alembert wishes to give his third law more scope... and tries to apply it to the static equilibrium of forces, as well as to the dynamic situation described... He says that products of mass and velocity can be either real and finite or only 'virtual'. It is the third law, then, that is supposed to cover the laws of statics [as well as of dynamics]. The unacceptable static forces are replaced by 'tendencies' or 'virtual momenta' which continually destroy each other if the system is in equilibrium. This outlandish use of momentum caused serious problems for d'Alembert, and later in the Encyclopédie he admits that his attempt to reduce all of statics to the mechanics of impact is not entirely successful." (Hankins, p. xxviii - xxix).
After the three laws is "d'Alembert's principle" as the direct result of them. "The usual modern statement of D'Alembert's Principle differs considerably from the way d'Alembert wrote it, and the modern reader is likely to have trouble following d'Alembert's methods. Since forces are not permitted in the Traité, d'Alembert is interested only in the changes of momentum or velocity, and the Principle is stated in terms of impulses.... [An example.] Consider two hard balls of mass M1 and M2 moving with velocity V1 and V2... They both strike a perfectly rigid, weightless rod AB at the same time and adhere to it at the points of contact. Because of the rod, they are forced to change their velocities abruptly to V'1 and V'2. The velocities destroyed by the constraint are V"1 and V"2. D'Alembert's Principle says that the 'movements' (M1V"1 and M2V"2) are in equilibrium, according to his third law, so that if they were applied alone to the rod, they would cancel each other and the rod would not move. These are not accelerative forces being considered, but impacts, just as they are described in his third law. The relationship between V"1 and V"2 can be determined from the laws of statics because they represent a case of equilibrium. Once V"1 and V"2 are obtained, the problem can be solved whether one is asked to determine the state of the system afterwards from its state before the collision, or vice versa." (p. xxxi)
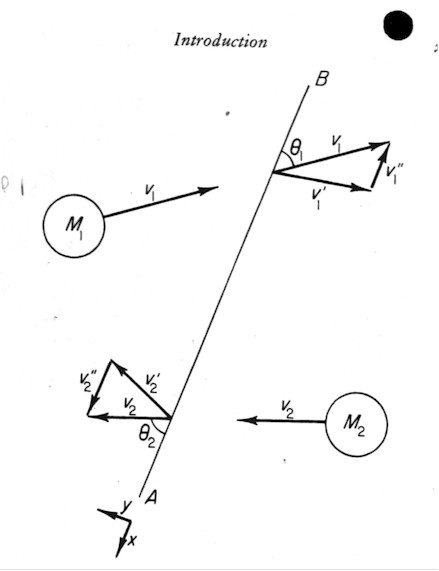
"The solution is as follows (by d'Alembert's Principle): (1) M1V"1 = -M2V"2. These momenta are directed along the rod taken as the x axis. Therefore, (2) M1V"1 = M1V1x - M1V'1x and M2V"2 = M2V"2 = M2V2x - M2V'2x (3) V'1x = V'2x since the masses are attached to the rod after collision. From (2) M1V"1 + M2V"2 = M1V1x + M2V2x - M1V'1x - M2V'2x and from (1) the left member of the above equation must equal zero [the state after the collision is in equilibrium]. Therefore M1V'1x + M2V'2x = M1V1x + M2V2x [= 0: equilibrium]. This result could, of course, be obtained directly from the conservation of momentum. From this equation and from (3) V'1x = V'2x = (M1V1x + M2V2x)/(M1 + M2) [i.e. total momentum divided by total mass in the system] = (M1V1cosq1 + M2V2cosq2) / (M1 + M2). [Note that cosq1 = V"1/V1, so that M1V1cosq1 = M1V"1; and M2V2cosq2 (similarly) = M2V"2/V2 * V2 = M2V"2] Since the changes of motion are directed along the rod, the velocity components perpendicular to the rod remain unchanged and M1V'1y = M1V1sinq1 [and] M2V'2y = M2V2sinq2." (Hankins, ibid.)
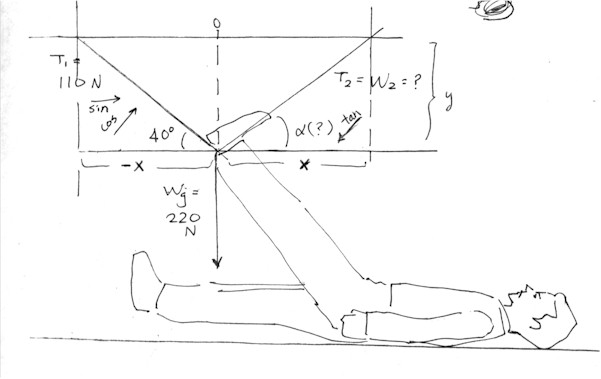
Since the point here is to establish the identity between statics and dynamics, we may simply use a case of statics in place of this difficult example of d'Alembert's. Consider a man with an injured leg which, hung from a thread which then pulls it from opposite directions (T1 and T2 or W2), remains balanced (static). The force of gravity then is pulling from the third, vertical direction. The data on the situation given in the figure. Now the force pulling along T2? The case of equilibrium means that all forces add up to 0, SF-> = ma-> = 0. The reason for the identity between dynamic and static, that different forces, "virtual velocities" in d'Alembert's words, result in equilibrium, is that force and so acceleration is a vector (->), and so that a variety of them may cancel each other out: we are not to repeat Descartes' mistake again in the controversy over the living force. Breaking the forces into their x and y components, SF-> = 0 means that SFx = 0 (i.e. on the x axis) and SFy = 0 (i.e. on the y axis). In the present case, the weight of the leg Wg has no x component. The total force on x axis is therefore W2cosqa + T1cosq40 = 0 = (W2 * x / W2) + (T1 * -x / T1) = 0; cosq40 = 0.7660; 110 * 0.7660 = 84.26 Newton, which is then W2cosqa (the x component of the force T2). Total force on y axis is T1sinq40 + W2sinqa - Wg = 0 = (T1 * y / T1) + (W2 * y / W2) - Wg = 0; now sinq40 is 0.6428; 110 * 0.6428 = 70.708; 220 - 70.708 = 149.292 (Newton) which is W2sinqa; now the square root of [(149 Newton)2 + (84 Newton)2] is (approximately) 171 Newton, the force of W2.
The rationality of d'Alembert's mechanics consists in answering the question "si les loix de la Statique & de la Méchanique sont de vérité nécessaire ou contingente" (p. xxiv) by favoring the former, deriving all these three laws and the principle from the very properties of mass (and the geometry of space and the uniformity of time), impenetrability as well as extension -- "from the characteristics of impenetrable extension" (Hankins, ibid., p. xxiii) -- laws, in his words, "que la matiere abandonnée ŕ elle-męme auroit suivies". (p. xxv) But it becomes evident here that only in conjunction with another foundation does the impenetrability of matter account for these three laws, henceforth necessary: Conservation or the tautology of A = A. As said, Newton's three laws of motion can be stated simply in terms of Conservation, so that the second law means simply that, given the conservation of (linear) momentum (Dp = 0) -- that the total momentum of a system, abandoned to itself, should always remain the same -- if momentum should change (when Dp is not 0) then it is because force is coming in from source external to the system, and the measurement of this force is the rate of change of momentum (F = (mv)d/dt). Now what is this mysterious source lying external to the system? We don't know and so d'Alembert wants to banish this un-empirical "mysterious" completely. So he dispenses with "force", gravity and the like, and Newton's second law in general. The system is completely isolated, and as such all that is in it (total momentum) remains always the same. His second and third law describes the interactions happening within this isolated system and so both laws are in fact just re-statements of the law of Conservation. In terms of the third law: dynamics becomes statics because statics is just a special case of dynamics; the conservation of momentum means that the change of momentum in one during its interaction with another must be compensated by the inverse but same amount of change in this other (Dp1 = -Dp2) in order for the total momentum of the system of these two to remain the same. When both, of the same momentum, go in opposite direction, the total momentum of the system they form is in fact 0 (because of the vector quality of velocity), so that their collision results in the mutual cancellation of movement: hence statics.
In terms of the second law: The new velocity is the old velocity minus (or plus) a lost (or gained) velocity; the lost (or gained) velocity has gone (or come from) elsewhere -- but not disappeared (or out of nowhere), of course, which is impossible. Old velocity can therefore be calculated or "restored" by adding (or subtracting) the lost (or gained) velocity to (or from) the new velocity. It is precisely because the total amount of momentum of the system must remain the same that the calculation of the new or old velocity can be done by knowing the other one of the two and the lost or gained velocity. What we learn here is that the backbone of classical mechanics so far is the law of Conservation; it is because the "total amount" of the system must remain eternally the same that the calculation of parts or instances of the system is possible -- as with d'Alembert -- or that the change accruing to a system from external source is proportional, predictable, as with Newton's second law. "D'Alembert's contribution to mechanics, at least as it was recognized in the 18th century, was to have given a geneal principle for the solution of a large class of mechanical problems. The motion of any system of linked masses could be discovered by a single straightforward method. It may not have reduced mechanics to a 'simple game' as d'Alembert had claimed, but it did at least provide a single method. Moreover, d'Alembert's laws and his Principle were apparently independent from experiment; they were the necessary results of the nature of space and the theorems of geometry" (Hankins, p. xxxiv); but moreover, of the necessary law of Conservation.
Footnotes:
1. There are mutual relations among these three: "on a appliqué heureusement, l'Algébra ŕ la Géometrie, la Géometrie ŕ la Méchanique, chacune de ces trois Sciences ŕ toutes les autres, dont elles sont la base & le fondement." Recalling the birth of calculus as the most advanced manner of representation. D'Alembert's text in the following is based on the New York Johnson Reprint (1968) with an introduction by Thomas L. Hankins.
2. But d'Alembert was not successful in dispensing with forces altogether. "They crept into his principles in spite of his caution and his attempts to avoid using them often forced him into absurd positions. For example, the science of statics deals with forces in equilibrium; the forces are acting, but no motions are produced. How can these equilibrium conditions be described...? A possible way out for d'Alembert would be through the 'Principle of Virtual Work,' a principle that determines equilibrium conditions by the infinitesimal displacements that would take place if the mechanical system did move, although no real motions are required. But the 'Principle of Virtual Work' requires forces in order to determine the work done, and therefore d'Alembert cannot accept this principle either. Instead, he measures static equilibrium by 'virtual velocities' -- the velocities with which objects 'tend to move'. Of course, these 'virtual velocities' or 'tendencies to motion' are no more observable than forces... Moreover, they led d'Alembert into a dangerous confusion between work and momentum..." (Hankins, p. xxii)
3. For d'Alembert, "[b]odies act on each other only in three different ways... [1] by immediate impulsion as in ordinary collision; [2] by means of some bodies interposed between them and to which they are attached [e.g. threads or rods]; [3] by a mutual attractive virtue, such as that between the sun and the planets in the Newtonian system". (Cited by Hankins, p. xxv) This first cause includes [1] and [2], the second corresponds to [3].
| ACADEMY | previous section | Table of Content | next section | GALLERY |